話が逸れましたが,公立はこだて未来大学.第一印象は「カッコイイ!」学校です.写真を以下に紹介しましょう.
 (mpeg1:
160KB)
(mpeg1:
160KB)山の中腹に突然現れるガラス張りの建物.写真右のムービー(mpeg1)を見て貰えれば雰囲気が伝わると思います.
「ロボティクス・メカトロニクス講演会2003」
初出:2003/6/4 T.Shirai
更新:2003/6/4 T.Shirai
日本機械学会ロボティクス・メカトロニクス部門のWebページはこちら.
日本機械学会/ロボティクス・メカトロニクス講演会のページはこちら.
日本国内のロボット工学研究発表の場として主要なものとして,日本ロボット学会と日本機械学会ロボティクス・メカトロニクス部門が挙げられます.
今回参加した「ロボティクス・メカトロニクス講演会’03」は略称「Robomec'03」(ロボメカ)と呼ばれています.ロボメカの特徴は,全ての研究発表が口頭発表ではなく,ポスターセッションとした点です.たとえば口頭発表(例.15分発表5分質疑)ですと,緊張して自分の発表の番を待ち(それまでの間は落ち着かないので他のヒトの発表を聞いていても集中できない),練習通りに発表を(一方的に)行い,短い質疑応答の時間内で2,3の質問を受け付けることしかできません.発表者ではなく聴衆としても,小心なヒトはなかなか思い切った質問や提案ができません.自分の発表が終ったらサッサと壇上から降りて次の講演者とバトンタッチしなくてはいけませんので,せっかく内容に興味を持ってくれた研究者ともジックリと意見交換できません.また,口頭発表の場合は同時に多くのセッションが並行して行われていますので,聞きたい講演が同じ時間にダブッてしまった場合には,どちらか一方を聞くのを諦めなくてはいけません.TVだったら録画できるんですけれどもねぇ.以上の理由から,私はポスターセッションの講演会が,発表者の立場としても聴衆の立場としても大好きです.
さて,本講演会でも予稿集がCD-ROMで配布されました.それとは別に冊子も1冊付いてきます(詳細はこちら).
今回は先に会場の紹介をしておきましょう.昨年のRobomec02は島根県のくにびきメッセという展示場だったのですが,今回は「公立はこだて未来大学」が会場です.そう,北海道の函館市です.函館が北海道のどのあたりにあるのか分からない方は,こちらを参照して下さい.名古屋からの飛行機は昼の2便のみです.「え?」と思われるかも知れませんが,少ないのです.札幌との間の便は比較的沢山ありますが,札幌と函館の間は意外と遠く,距離で300km程度,電車で5時間掛かります.まさにデッカイドウ北海道です.
話が逸れましたが,公立はこだて未来大学.第一印象は「カッコイイ!」学校です.写真を以下に紹介しましょう. (mpeg1:
160KB)
山の中腹に突然現れるガラス張りの建物.写真右のムービー(mpeg1)を見て貰えれば雰囲気が伝わると思います.

後ろを振り返ると,遥か彼方に海が見えます.多分,函館湾です.いやぁ,ホノボノとした気持ちになります.


下にいるヒトビトは1Fから,私はバス停から道なりに歩いて建物横の3Fの入り口から入ります.うん,看板もあるし,間違いないようです.
左は「交流広場」,右には「駐車場」と「多目的フィールド」,つまりこの大学の建物は,この奇妙な学校らしくない建物一棟のみ.ちなみに昼休みの時間に交流広場では大先生たちを含め大勢の参加者があちらこちらに島を作りながら草地の上でくつろいでいました.海外の大学の映像でみる,あの光景.「ああ,キャンパスってこんな感じ」だと感動してしまいましたが,ここは北海道,冬場は雪だるまやカマクラが作られるんだろうなぁと思うと,一気に夢から覚めました.1年中,今日みたいな小春日和だったら最高なのに.
日程は3日間で,スケジュールはこちら.私の発表は「ワイヤ駆動式ロボットの関節剛性調整機構SATの提案〜SATの特性の解析とモデル化〜」(2P2-2F-F1)です.2日目の午後2番目のセッション(=2P2)で,2階のフロア(2F)のF1番.25日の14:45〜16:45の2時間(うちコアタイムは1時間),なんと学会最後の最後.23日(金)は16時まで工学実験があるので,出発は24日(土)になります.そして26日(月)は午前中に専攻科の授業があるから,それまでには戻っていなくてはならない.したがって「24日の昼の飛行機で函館に飛び,25日夕方の便で東京まで戻って一泊し,26日の朝の新幹線で鈴鹿に戻る」という強引なスケジュールになります.そもそも24日は15時頃に会場に到着するので,発表は一つも聞けず,懇親会から参加するという楽しくない状況.私が発表する25日の14:45からなんて,皆,帰路についていて残っていないことが容易に予想できる.
24日は会場に入ったら,すでにその日の講演は全て終了,特別講演が終って,これから表彰式が始まろうかというところ.今回は,広島大学大学院でお世話になった辻教授が受賞されたとのこと.授賞式の後はバスに乗って函館市内に移動して懇親会.あとは推して知るべし.
25日は会場に入ってすぐの所にある機器展示ブースで(株)応用計測研究所のF氏と雑談.うちの研究室にもVIDEO TRACKER
G280が納入されています.簡単に言うと空間上のマーカーの3次元位置情報をリアルタイムに非接触で計測できる計測装置です.使う前には必ず校正作業が必要で,かなり不便だと感じていました.労力を減らすために,半年ほど前から暖めていたアイディア(詳細は秘密)がありましたので,このチャンスにお話したところ,いままさにその開発を行っているところであるという嬉しい返事.そうかぁ,私以外にも同じことを不満に思って,同じ対策を考えている人が居るのだな.安心,安心.
参加費用は,日本機械学会(あるいは協賛学会)の正員/準員:15,000円,会員外:20,000円,学生会員:8,000円,一般学生:10,000円(日本機械学会の年会費は正員:12,000円,準員:9,000円,学生員:6,000円,入会金が別途必要)です.予稿集の冊子とCD-ROMは参加費に含まれています.もし講演会に参加したい場合は引率しても構いません(ちなみにH16年は名古屋で開催されます).ちなみに先生方はそれぞれ専門分野の学会に属していますが,講演会参加費・年会費ともに自腹です.
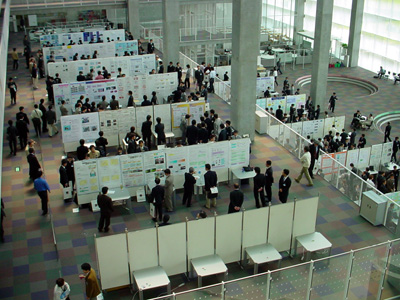
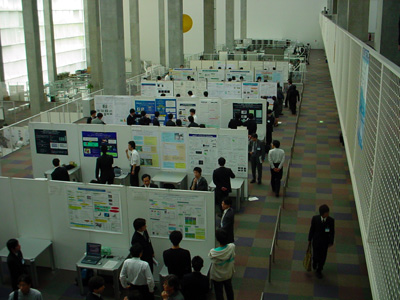
講演会の風景です.
 (mpeg1:
248KB)
(mpeg1:
248KB)
1,2,3Fのフロアを使ってポスター展示を行っています.まるで見本市会場かといった凄くオープンな作り.普段はこのオープンスペースを使って授業や実習(デザインなど)を行っているようです.ちなみに教官室もあるのですが,入り口だけではなく通路側の壁は全面ガラス張りですから,部屋の中でグーグーと寝ていたり,カップメンを食べていると一目でバレます.
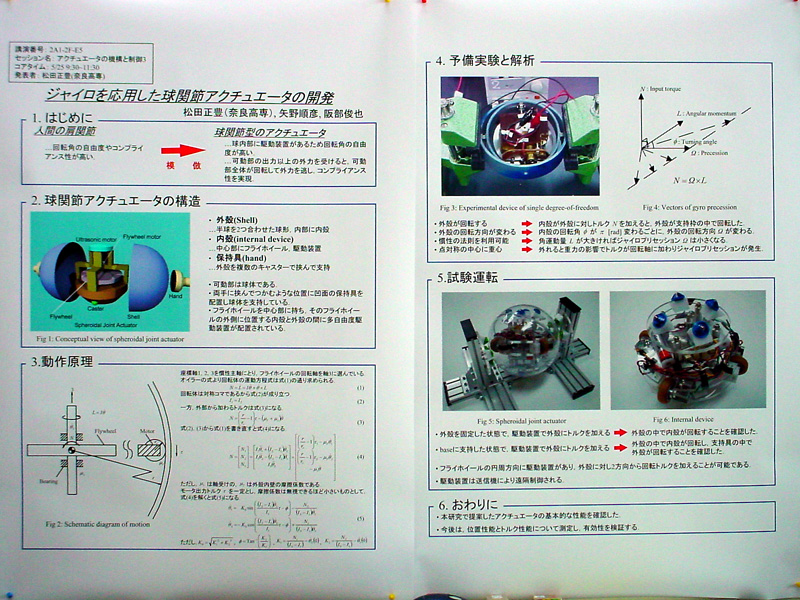
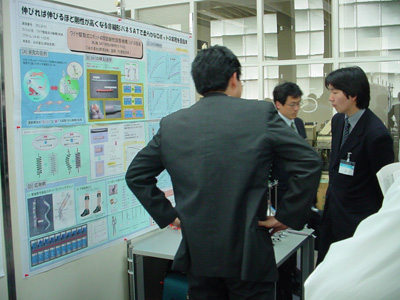
こちらは奈良高専の矢野先生の発表.ユニークな構造・原理のアクチュエータです.以前に私もジャイロを用いた力覚提示装置を指導教官の指示に従って考えたことがあります.2週間ほど物理の教科書(大学課程用)を読んでは「コリオリ,コリオリ」呟きながら悩んだのですが諦めたことがあります.ですので,最初は奈良高専の先生とかそういうことは気にしないで「どうして,どうしてうまく動くの???」と発表者(専攻科2年生)に質問を続けていました.そのうちに矢野先生と話を始めたところ,実は鈴鹿高専専攻科出身(I科の齊藤先生の研究室)の方であることが判明.世の中狭いです.

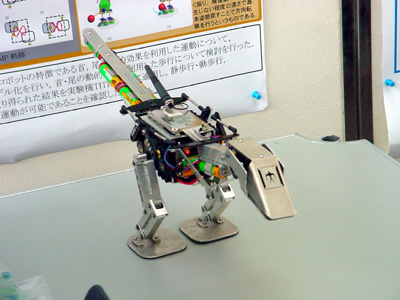
こちらは東京工業大学の広瀬研で開発中の「恐竜型二足歩行ロボット,TITRUS」.首と尾の動的効果を利用した歩行をデモンストレーション.恐竜だからカッコイイとかカワイイというのではなく,歩行に伴う上体の振れを首と尾の左右方向への回転運動でキャンセルすると同時に,その運動エネルギーを次の歩行動作に回生しようという野心的な研究.私の研究室で開発中のロボット尻尾「ROBO-TAIL」も同じ効果を狙っているので,(相手にならないほど我々の方が弱いのですが)ライバルです.

 (mpeg1:
464KB)
(mpeg1:
464KB)
こちらは産業技術総合研究所・知能システム研究部門で開発中の「モジュール型ロボットの進化的運動獲得に関する実験的研究」です.右の写真のパソコンの周辺に転がっているのがロボットのモジュールで,これらが複数個集まって一つのロボットを形成します.各ユニットは動作中に自由に結合・分離可能です.1本に連なってヘビのように動いたり,2本足や4本足の形態にトランスフォームすることで歩いたりすることができます.変形メカとして面白いから作った,のではなく,このように自由度の高い機構が組み合わさって所定のタスクを完遂するには,お互いのユニットがどのように協力し合うのか?を明らかにすることが研究の目的です.本来,コンピュータシミュレーションで問題ないのですが,人工知能研究の分野でも良く言われるように,リアルな外界との間の相互作用が知能の解明あるいは人工知能の構築には重要であるという観点(身体性とも言います)から,製作したものだと思います.もちろん,TVウケするのも事実で,私もこのロボットは何度かTVで見たことがあります.


これは私の発表です.小型のロボットを2台,現地まで運んだ甲斐がありました.内容もそれほど難しいものではないので,非常に多くの方が足を止めてくれました.
P.S. そうそう,今回は会場をウロウロ歩き回っていたところ,突然,尻を叩かれてビックリ.後ろを振り返るとヒゲ面の男性がニコニコしながら「よっ」と言っている.しばらく誰だか分からず怪訝そうな顔をしてしまいましたが,ソニー(株)在職時に同期だったI君.当時,二人とも生産技術関連の部署に所属していたのですが,私は会社を辞めて大学院に進み,彼は志願して職場を移ってエンターテイメントロボットの開発部署に居ます.遠回りしたけれども,6年ぶり(うーむ,そんなに昔とは思えない)に北海道で再会を果たしました.
P.S.
昨年度のロボメカ02は専攻科のM君が発表を行いました.本年度は私が発表を行ったのですが,実験データの採取と解析は卒研生のT君にお願いしました.その上,現地に持ち込むロボット1台を運ぶ,文字通りのカバン持ちとして現地まで同行して貰いました.それ以外にもロボット(ランディングマシン)の修理を行ってくれたU君,T君,もう一台のロボット(3D-ROBO-TAIL)の製作を手伝ってくれたK君にも感謝しています.
<戻る>