
(ムービー MP4: 35MB)
ところどころに私の声が入っていますねぇ.失敗失敗.
●UFOキャッチャー(電気工学科学科展示,2002年度・高専祭,4E)
初出:2002/11/15
T.Shirai
更新:2002/12/19T.Shirai
<システムの説明>
(ムービー MP4: 35MB)
ところどころに私の声が入っていますねぇ.失敗失敗.
少年達にも大ウケ
これが操作用のプッシュスイッチ.
1回押すと横方向に動き,放すと停止.もう一度押すと縦方向に動き,放すと停止.下降・キャッチ・上昇などの一連の動作に移ります.
(ちなみに当初はこのスイッチが二つ並んでありました.その造形から別名は...「(省略)スイッチ」.残念ながらI/O点数削減のために1個となりました)
ナイスキャッチ!
簡単なようで難しく,かといって難しすぎない.ゲームバランスは良好.
これが今回,制御に用いた小型PLCのシステム.装置の天井部分にヒッソリと隠れています.
DINレール上に左から端子台,ターミナルリレー,PLC(拡張ユニット),PLC(本体),端子台,スイッチング電源の順に並んでいます.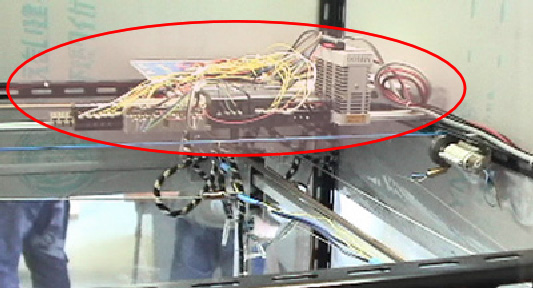
さすがは電気工学科.安価なのに効果絶大な照明.
製作者の皆さん.
機構,デザイン共に学生の展示物としては非常に高いクオリティにあると思います.ご苦労様!
(私は制御用コントローラの配線とプログラミングのみ,それ以外の部分は全て彼らの仕事です)
<制御系の設計・製作・デバッグ>
(1)
聞き取り:
まず,アクチュエータ,センサの構成,希望する動作,操作方法などの聞き取りを行い,概念設計を行う.
(2) 信号系統図の設計:
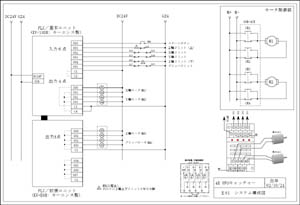 (PDF:196KB,
A3ヨコ)
(PDF:196KB,
A3ヨコ)
PLCはキーエンス社のKV-10DRを使用しました.入力6点,出力8点.これだけでは足りないので拡張出力ユニットKV-E8R(出力8点)を増設.ちなみに動作リミット検出用のリミットスイッチは前進端,後進端,それぞれ個別に準備されていますが,PLCの入力端子数の都合で,Z軸上下以外は両端をAND接続しています(b接点のANDなので結果的にOR:ド・モルガンの定理).モータの正逆回転にはオムロンのターミナルリレーG6B-4CBを選定.1パッケージに4つのc接点リレーを内蔵していて非常に使い易い.スイッチング電源はキーエンスのMS-H50,端子台は東洋技研.全てDINレール取り付け可能な部品です.
(3)I/Oリスト:
外部I/Oは信号系統図を設計した段階で以下のように決定しています.これは問題なし.
(Xは入力,Yは出力.PBは押しボタン(PushButton),LSはリミットスイッチ,CRはサーキットリレー,N.C.は無接続)
PLCのプログラミングを行う上で一番大切なのは,内部リレーの割り振りを先に決めておくことです.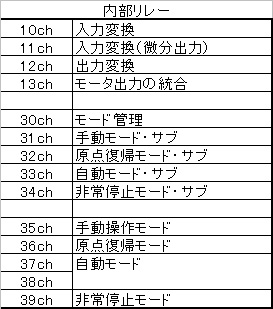
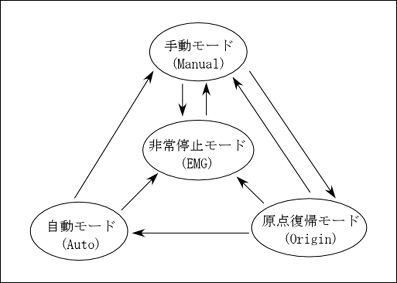
一般に自動機は右図のような4つのモードで管理します.手動モードは電源投入直後のモードで,例えば各アクチュエータを個別に操作できるモード.原点復帰モードは,マシンが自動運転を開始するための準備として,初期状態に各アクチュエータを戻す自動動作を行います.複雑な装置の場合にはユニット間の干渉があるので,各アクチュエータを原点位置に戻す際に順番を考慮に入れる必要があるためです.3つ目のモードは自動運転モードで,このモードに入るには必ず原点復帰モードを介さなくてはならないのは図からも明らかですね.最後の非常停止モードは,何らかの非常停止要因(タイムアウトやインターロックセンサなど)がONになった場合に,手動・原点復帰・自動運転のどのモードにいたとして即座に遷移してきます.非常停止を解除した後は必ず手動モードに遷移するので,自動運転を開始するには原点復帰を行う必要があり,これは理に適っています.
今回のUFOキャッチャー,実は非常停止要因がありません.それでも一応,非常停止モードは準備してあります.
(4)
ラダープログラミング:
マシンの動作も理解し,I/Oも割り振ってしまえば,あとはラダーを一気に書き上げるだけです.近頃はWindows上で動く便利なラダーサポートツールが提供されていますが,やはり手書きが一番効率が良いです.手書きが完了したら,先に内部リレーのコメントを入力,それからラダーを入力していくと入力ミスを早い時点で発見できます. (PDF: 62KB, A4, 12Page)
(PDF: 62KB, A4, 12Page)
ラダーのデータ(PLC_UFO.LZH:9KB)(ただし閲覧するには専用のラダーサポートツールが必要です)
(5) 使用部品を揃えて制御部単体で配線開始:
全て部品をDINレールに取り付けて,PLC回りの配線を済ませます.
(6)
配線&デバッグ:
Z軸上下のリミットセンサに関する設計変更がありましたが,それ以外は呆気ないほどトラブルがなくデバッグ完了.
高専祭の2日間,問題なくガンガン動いてくれたようです.