Power
Glove活用研究
最終更新日: 1998年12月23日
What's New? : Power GloveのデータをPC(PC9821Xa9)に取り込むことに成功しました.
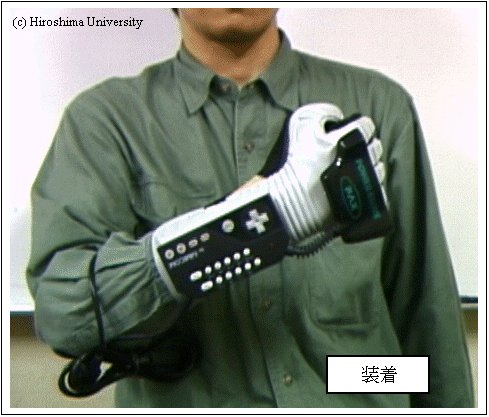
(Power Gloveの全景など,写真は,ここにまとめてあります)
(目標)
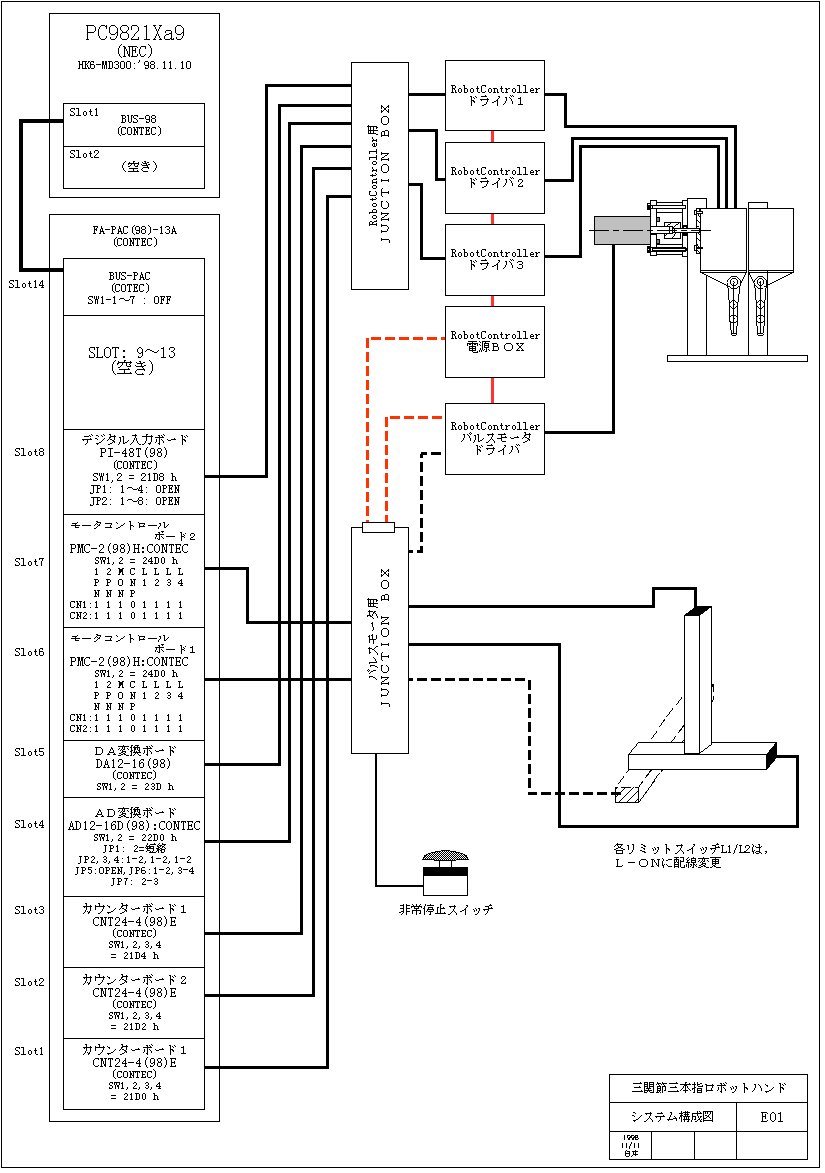
Power Gloveをマン・マシンI/Fとして利用して,既存の三関節三本指ロボットハンドをコントロールする. Power
Gloveの出力する情報を利用して,
を行なう.
(現状)
- PC9821Xa9に増設したAD/DA混載ボード(ADA12−8/2(98)H:株式会社コンテック製)上のデジタル入力(DI)とデジタル出力(DO)を利用して,Power
Gloveと接続.
- 「DOS/Vで楽しむバーチャルリアリティ」(NICHOLAS LAVROFF著,インプレス編集部監訳:ISBN4-8443-4621-0
定価2,400円)に付属のPower Glove制御用サンプルプログラム theglove.c を改造し,データの取り込みに成功.
(問題点)
- X,Y,Z軸座標を取得可能だが,Y軸データが特に不安定である.
- 異常なデータを取り込む頻度がまだ高く,安定性に欠ける(波形をオシロスコープで観測したが,スパイク状のノイズが多く重畳している).
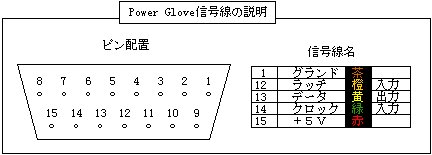
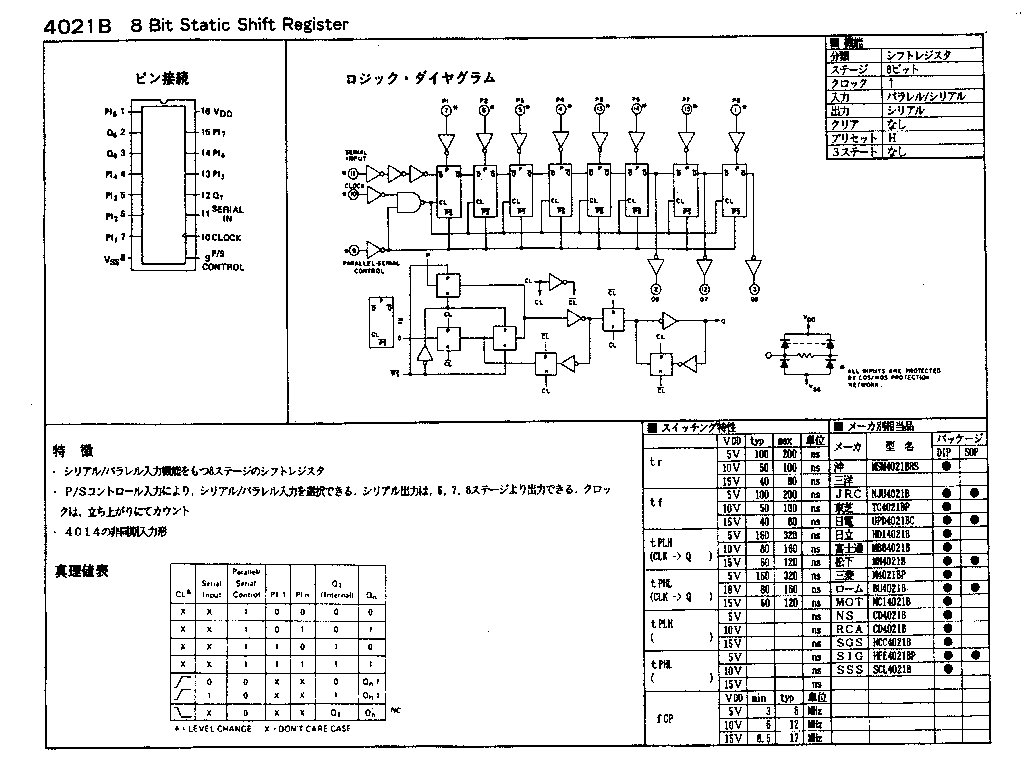
(技術資料)